
HKJQR-MV03D型 机器视觉教学实训平台
HKJQR-MV03D型 机器视觉教学实训平台基于3D智能相机和2D工业相机,搭配多种行业应用的真实工件和虚拟仿真的应用场景,融合3D视觉系统调试应用开发、2D视觉系统应用技术、图形化视觉处理技术、机器人离线编程与调试技术、深度学习等实训功能。
HKJQR-MV03D型 机器视觉教学实训平台提供配套完善的实训教材与培训视频,能满足视觉算法,软件,机械,电气以及机器人相关专业的学员,开展机器人从基础示教、离线编程、到复杂视觉应用开发等知识点的实验实训。
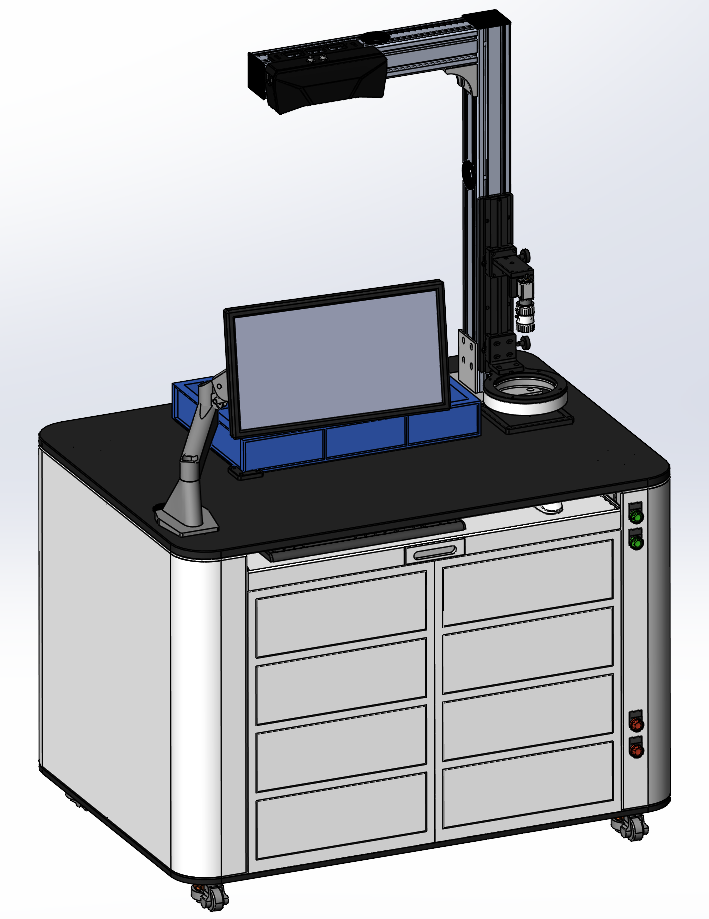
平台模型图

一、技术参数
输入电源:单相三线220V±10% 50Hz
3D相机型号:proS 700C
2D相机型号:A3B00MG000
2D镜头型号:MFA121-U25
2D光源型号:CST-RS18030-B
工作环境:温度-10℃~+40℃
相对湿度≤85%(25℃)
平台尺寸:1170 x 830x 1700mm
安全保护:具有漏电保护,安全符合国家标准
二、视觉系统模块
(1)工业级3D相机
①智能程度高
基于先进的视觉算法,可处理各类工件以及纸箱、麻袋、货品等典型物体,轻松应对随意堆叠、无序放置、一定程度反光、暗色等复杂工况。
②稳定可靠
Mech-Eye工业级3D相机具备IP65防护等级,可在严苛的环境中稳定运行,且已通过CE、FCC、VCCI及RoHS认证。
③开放性强,部署简单高效
提供多语言、多平台的SDK选择,接口开放,部署简单。可选择搭配Mech-Vision、Mech-Viz使用,轻松、快速部署各类检测/量测应用。

3D工业相机
(2)工业级2D相机
①结构紧凑,便于集成
尺寸为29mm*29mm*29mm,采用USB3.0数据接口,5Gbps理论传输宽带,USB 接口直接供电,支持软件触发、硬件触发、自由运行等多种模式。
②开放性强,便于拓展
兼容Windows及Linux操作系统,支持TWAIN和DirectShow接口,SDK开发包支持VC、VB、C#、Delphi、Labview等语言,支持对接Mech-Vision、Halcon、Labview、OpenCV、Matlab等第三方软件。

2D工业相机
(3)图形化视觉处理软件
完全图形化的视觉软件,无需编写代码即可完成拆垛、无序工件上料等视觉应用。
内置3D视觉、深度学习等前沿算法模块,可满足复杂多样的应用需求。

图形化视觉处理软件
(4)机器人智能编程软件
完全图形化的机器人智能编程环境,支持数字孪生。
内置轨迹规划、碰撞检测、混码等智能算法,适配国内外众多主流品牌机器人,如ABB、KUKA、FANUC、DENSO、UR、AUBO、JAKA等。
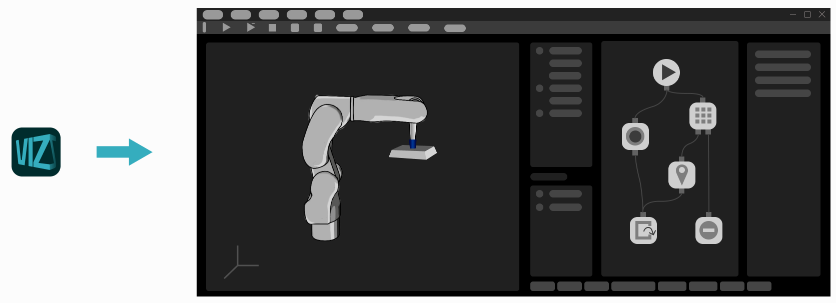
机器人智能编程软件
(5)机器视觉深度学习平台软件
包括缺陷检测、分类、实例分割等功能,可对物体快速识别、定位、判断物体状态以及检测缺陷算法。
深度学习自主训练工具,将深度学习模型训练的数据采集、筛选、导入、标注、模型训练、验证及部署应用的过程进行全流程整合,方便自主操作,提升训练效率,并全程保证数据安全性。

机器视觉深度学习工作流程
三、实训项目
该平台配备10多个实训项目的软硬件资源,包括工程、实训操作文档和培训视频等。
下文以纸箱拆码垛、电机转子上料、钢筋打标计数等应用场景为例做简单介绍。
1、纸箱拆码垛
该项目模拟实际工业场景的纸箱拆码垛。
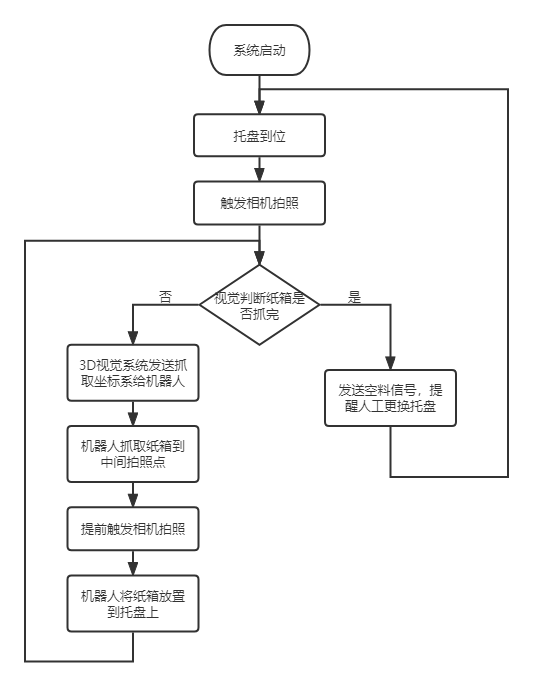
工作流程&应用场景:

纸箱拆码垛工作流程&应用场景
2、电机转子上料
该项目模拟实际工业场景的电机转子上料。
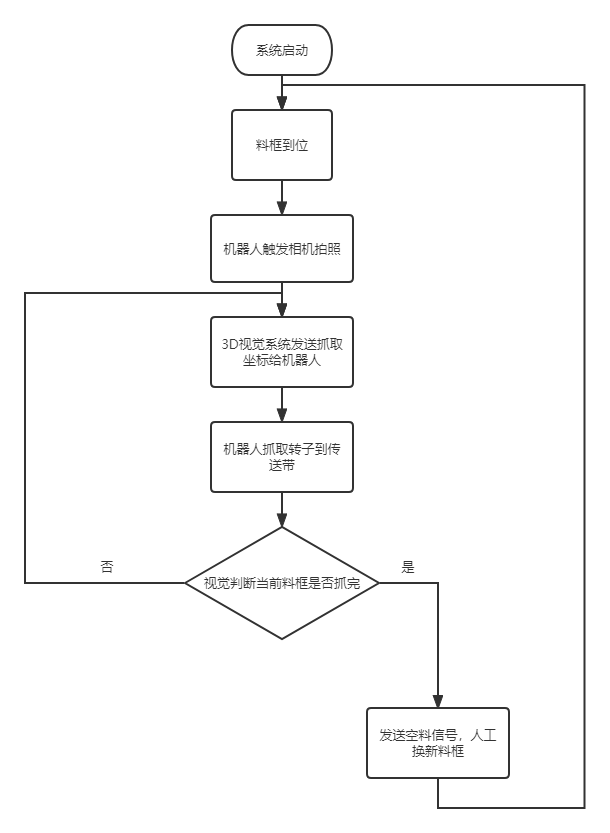
工作流程&应用场景:
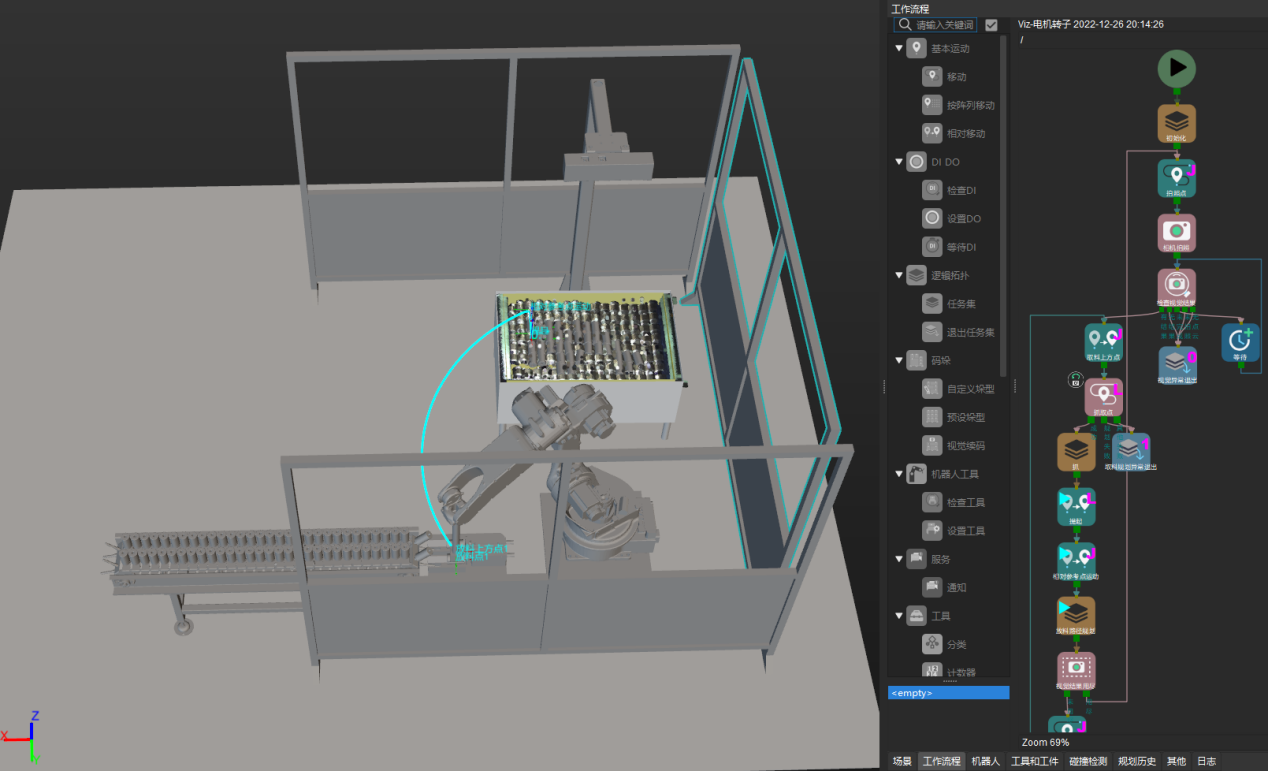
电机转子上料工作流程&应用场景
3、钢筋打标计数
该项目模拟实际工业场景的钢筋打标计数。
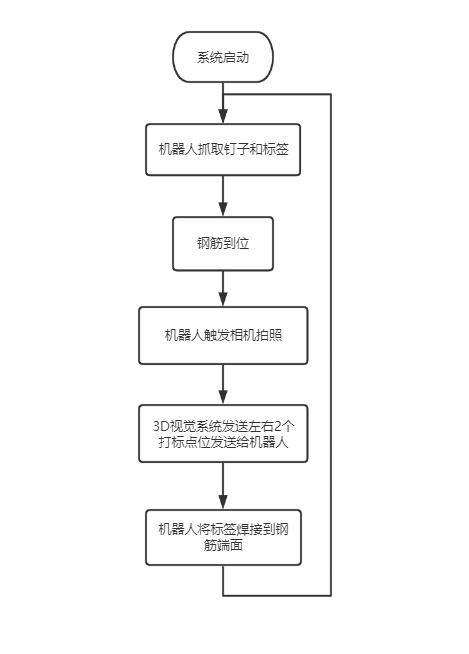
工作流程&应用场景:
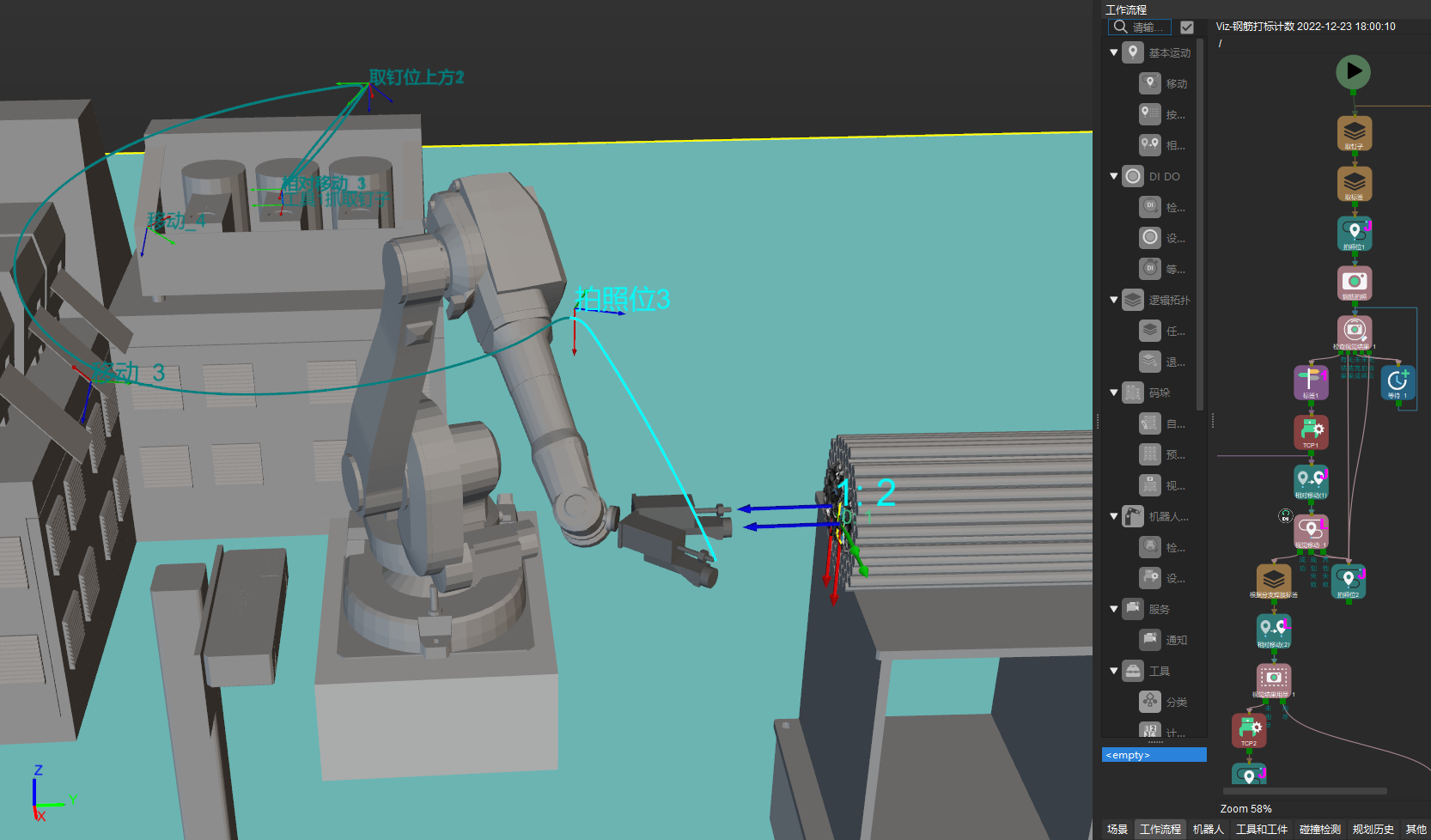
钢筋打标计数工作流程&应用场景
四、实训课程
平台可支撑和构建的课程,涵盖《3D视觉实操与应用技巧》、《AI+机器视觉典型应用案例实践》等。
1、《3D视觉实操与应用技巧》实训项目
|
项目1 安装3D视觉系统 |
|
任务1-1 机械安装 |
|
任务1-2 线缆安装 |
|
任务1-3 软件安装 |
|
项目2 采集3D相机的图像数据 |
|
任务2-1 连接相机 |
|
任务2-2 配置相机参数 |
|
任务2-3 保存数据 |
|
项目3 图像标注和深度学习模型训练 |
|
任务3-1 新建DLK工程 |
|
任务3-2 算法模块介绍 |
|
任务3-3 导入图像数据 |
|
任务3-4 数据集介绍 |
|
任务3-5 图像标注和模型训练 |
|
任务3-6 模型验证和模型应用 |
|
项目4 视觉主控烧录 |
|
任务4-1 主控烧录准备 |
|
任务4-2 主控烧录操作 |
|
任务4-3 主控移动控制机器人 |
|
项目5 相机外参标定 |
|
任务5-1 相机外参标定概述 |
|
任务5-2 标定前准备 |
|
任务5-3 采用多个随机标定板位姿方式的ETH标定 |
|
任务5-4 采用多个随机标定板位姿方式的EIH标定 |
|
任务5-5 采用TCP尖点触碰方式的ETH标定 |
|
任务5-6 采用TCP尖点触碰方式的EIH标定 |
|
项目6 制作点云模板和添加抓取点 |
|
任务6-1 点云模板和抓取点概述 |
|
任务6-2 生成点云模板 |
|
任务6-3 编辑点云模板 |
|
任务6-4 添加抓取点 |
|
任务6-5 保存点云模板和抓取点 |
|
项目7 搭建视觉工程 |
|
任务7-1 Mech-Vision软件的基本操作 |
|
任务7-2 常用步骤介绍 |
|
任务7-3 步骤组合介绍 |
|
任务7-4 工程实战——电机转子上料的Mech-Vision工程搭建 |
|
项目8 搭建机器人工程 |
|
任务8-1 Mech-Viz软件的基本操作 |
|
任务8-2 常用任务介绍 |
|
任务8-3 工程实战——电机转子上料的Mech-Viz工程搭建 |
|
项目9 3D视觉进阶功能 |
|
任务9-1 查看3D视觉软件版本 |
|
任务9-2 Mech-Vision典型应用工程介绍 |
|
任务9-3 Mech-Vision示例工程介绍 |
|
任务9-4 相机主控其它品牌机器人通讯 |
|
任务9-5 认识标准接口 |
|
任务9-6 3D视觉随机手册查阅 |
2、《AI+机器视觉典型应用案例实践》实训项目
|
项目1 学前准备 |
|
任务1-1 项目式教学概述 |
|
任务1-2 3D视觉典型应用工作站概述 |
|
任务1-3 学习资源概述 |
|
任务1-4 本书中典型应用工作站的使用注意事项 |
|
项目2 2D视觉典型应用——零部件缺陷检测 |
|
任务2-1 零部件缺陷检测工作站的功能需求 |
|
任务2-2 零部件缺陷检测工作站的系统实现流程 |
|
任务2-3 零部件缺陷检测工作站的DLK工程实现 |
|
任务2-4 零部件缺陷检测工作站的视觉工程实现 |
|
项目3 2D视觉典型应用——零部件尺寸测量 |
|
任务3-1 零部件尺寸测量工作站的功能需求 |
|
任务3-2 零部件尺寸测量工作站的系统实现流程 |
|
任务3-3 零部件尺寸测量工作站的视觉工程实现 |
|
项目4 3D视觉典型应用——纸箱拆码垛 |
|
任务4-1 纸箱拆码垛工作站的功能需求 |
|
任务4-2 纸箱拆码垛工作站的系统实现流程 |
|
任务4-3 纸箱拆码垛工作站的视觉功能实现 |
|
任务4-4 纸箱拆码垛工作站的运动规划功能实现 |
|
任务4-5 纸箱拆码垛工作站的使用注意事项 |
|
项目5 3D视觉典型应用——金属上下料 |
|
任务5-1 金属上下料工作站的功能需求 |
|
任务5-2 金属上下料工作站的系统实现流程 |
|
任务5-3 金属上下料工作站的视觉功能实现 |
|
任务5-4 金属上下料工作站的运动规划功能实现 |
|
任务5-5 金属上下料工作站的使用注意事项 |
|
项目6 3D视觉典型应用——钢筋打标计数 |
|
任务6-1 钢筋打标计数工作站的功能需求 |
|
任务6-2 钢筋打标计数工作站的系统实现流程 |
|
任务6-3 钢筋打标计数工作站的视觉功能实现 |
|
任务6-4 钢筋打标计数工作站的运动规划功能实现 |
|
任务6-5 钢筋打标计数工作站的使用注意事项 |
|
项目7 3D视觉典型应用——商超分拣 |
|
任务7-1 商超分拣工作站的功能需求 |
|
任务7-2 商超分拣工作站的系统实现流程 |
|
任务7-3 商超分拣工作站的视觉功能实现 |
|
任务7-4 商超分拣工作站的运动规划功能实现 |
|
任务7-5 商超分拣工作站的使用注意事项 |
|
项目8 3D视觉典型应用——钢板开坡口 |
|
任务8-1 钢板开坡口工作站的功能需求 |
|
任务8-2 钢板开坡口工作站的系统实现流程 |
|
任务8-3 钢板开坡口工作站的视觉功能实现 |
|
任务8-4 钢板开坡口工作站的运动规划功能实现 |
|
任务8-5 钢板开坡口工作站的使用注意事项 |

